
MSA Projects · Analogue Rover Research
Starchaser
Marsupial Rover
Australia's pressurised analogue rover — investigating the human factors of long-range Mars surface exploration since 2000.
Overview
Why a Pressurised Rover?
Mars has a surface area roughly equivalent to that of all the Earth's continents combined. Humans sent to Mars will need to safely travel long distances across its surface for scientific research and resource location — requiring rugged, self-contained, all-terrain vehicles capable of long overland journeys, pressurised living quarters, and years of operation.
Key questions remain largely unresolved: What is an optimal crew size for such a vehicle? How much internal space needs to be pressurised? How small can a vehicle be and still undertake long-distance traverses of 200 km+? What are the optimal exploration strategies?
The Starchaser Marsupial Rover was developed to begin answering these questions through real-world analogue field testing in Australia.

The Starchaser Marsupial Rover during construction.
Background
Mars Society Rover Initiative
In 2000, the international Mars Society Rover Initiative (MSRI) provided three teams with seed funding to commence design and construction of working Mars pressurised rover simulation platforms. Two teams were from North America; the third was Mars Society Australia.
The vehicles were constructed to undertake human-factors research — not required to be custom-engineered structures with exact tolerances and sophisticated life support, but designed to realistically simulate the spatial and operational characteristics of real Mars rovers, with airlocks, work spaces, living quarters, and storage.
Both the Michigan Everest and Canadian Ares rovers were built and trialled in planned, simulated cross-country expeditions. This included comparative field missions in 2003 at the Australian-Canadian Expedition 1 at the Mars Desert Research Station in Utah, providing the first comparative data on pressurised rover designs.
The Australian analogue rover — the Starchaser Marsupial — was formulated with a longer-term vision: to develop a family of rovers and contribute to the design database for future real Mars rover vehicles.
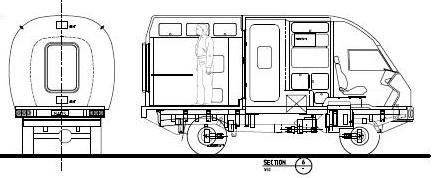
Marsupial cross-section view showing crew compartments.
The Vehicle Basis
The Marsupial is based on the chassis of a Forward Control (FC) Land Rover — a Series IIA with a distinguished history as a rugged 4WD military truck, emergency ambulance, and expedition transport. The forward-control layout places the cab over the engine, providing interior space equivalent to a much larger conventional vehicle.
The rover is intended to be driveable on public roads, which greatly enhances its useability for field exercises, transport between analogue sites, and public display.
Design Evolution
From Wombat to Marsupial
The rover design has evolved considerably since the project commenced. Three major design iterations have been developed and documented.
🦘 Wombat (2000)
The original competition entry — a large, custom-engineered, dynamically shaped vehicle with large retracting wheels. Ambitious but beyond accessible budget constraints.
🔩 HOP (2000–01)
Human Operations Prototype — a more practically engineered design that could be built within a realistic budget, retaining the research objectives of Wombat.
🚙 Marsupial (2002–present)
The current production design — based on the FC Land Rover chassis. Updated after the project moved to Perth in 2002, incorporating lessons from HOP and the North American rover trials. An add-on robotic arm study, the M-Paw, has also been undertaken.
Current Final Design Specifications
The current rover design accommodates a standard crew of 2 for non-science exploration sorties, with space for an optional third crew member for science-focused field trips, and an emergency mode for four crew members overnight.
The rear section — containing living and work spaces — is detachable and capable of operating as a portable emergency shelter. In this mode, the rear tray can carry payloads or equipment such as a small crane.
Construction
Project Stages
Construction is separated into three stages, with Stages 2 and 3 running concurrently.
Stage 1 · Funded by US Mars Society (2001)
Chassis Acquisition & Base Modifications
Purchase of the Forward Control Land Rover Series IIA chassis, and its refit and modification for use as the Marsupial rover platform. Includes engine work, structural assessment, and preparation for body fabrication.
Stage 2 · Sponsored by Starchaser Industries
Body Design & Construction
Design and construction of a fibreglass/composite body to transform the chassis into an eye-catching, functional Mars rover. Must effectively serve as a test vehicle for exploration strategies, equipment trials, and plausible surface operation scenarios. Work includes floor sandwich assembly, firewall installation, forward control linkage, and exterior panels.
Stage 3 · Sponsored by Starchaser Industries
Interior Fit-Out
Complete interior installation: lighting, communications station, storage cabinets, bunks, spacesuit lockers, sink and toilet facilities. On completion, the vehicle becomes a self-contained camper ready for travel across simulated Martian terrain — suitable for multi-day analogue field missions.
Trax Field Trials
The field trial programme — known as Marsupial Trax — will conduct comparative field tests of the Marsupial rover against the North American designs. Dr Graham Mann's comparative studies from Expedition 1 were published in the Journal of the British Interplanetary Society; Trax will extend this dataset to the Australian vehicle once construction is complete.
Construction Log
Project News
Selected highlights from the Marsupial construction log (2004–2008). View full archive on the legacy site ↗
2008
Rover Moves to New Workshop
The machine was shifted to an exhaust shop for brake and clutch plumbing work. Despite skills-shortage delays, work on the forward control linkage is underway with detailed engineering plans prepared by MSA engineer David Willson.
Read full article ↗2008
Cooler Weather Allows More Progress
Floor pedals, brake booster, and steering column mounted to the firewall. Interior framework finalised. Detailed construction plans for the forward control steering linkage completed. Floor sandwich assembly commenced, involving custom aluminium panels, insulating foam, and marine plywood.
Read full article ↗2007
AMEC 2007 Display & Firewall Installation
The partially completed vehicle was displayed at the 7th Australian Mars Exploration Conference in Perth, where it received positive attention from MSA members, NASA representatives, and academics. The aluminium firewall — a key structural and control-mounting element — was subsequently fitted.
Read full article ↗2005
Trinity College Builds Dedicated Rover Shed
A new colourbond garage, designed specifically for the Starchaser, was built at Trinity College in East Perth. A 1/12-scale model was exhibited at the 5th Australian Space Science Conference in Melbourne alongside MarsSkin 3 and Mars-Oz plans.
Read full article ↗2004
Construction Continues
New forward and rear propeller shafts fitted, primary fuel tank and shock absorbers installed. Steel floor framework nearing completion, ready for floor sandwich assembly (aluminium underside, thermal insulation, aluminium/plastic upper layer).
Read full article ↗Documents & Downloads
Resources
Design & Proposal Documents
| Document | Description | Size |
|---|---|---|
| Wombat Competition Entry 2000 | Original MSRI competition submission — large-wheel dynamically-shaped rover concept | 1,428 KB |
| HOP Proposal Document 2000 | Human Operations Prototype — revised budget-accessible design | 1,038 KB |
| HOP Press Kit 2001 | Media and outreach pack for the HOP design | 1,038 KB |
| Cairns, Fenton & Hoffman — LPSC 2001 Abstract | Progress Towards Mars Rover Simulations in the Australian Outback | 1,136 KB |
Engineering Drawing Set — February 2007 Progress
| Drawing | Size |
|---|---|
| Fibreglass Form Progress | 91 KB |
| GA-1 Rover — General Arrangement (DRAFT) | 203 KB |
| Modification to Chassis — Progress | 96 KB |
| ST-2 Rev 2 — Mid Cabin | 150 KB |
| ST-3 Rev 1 — Front Cabin | 225 KB |
| ST-4 Rev 1 — Mid Cabin Floor | 262 KB |
Academic Record
MSA Publications
The Marsupial project has generated a body of peer-reviewed and conference publications documenting design development and field trial results.
- Mars Society Australia (2000). Project Marsupial Human Operations Prototype (HOP). [See downloads above]
- Hoogland, J. (2000). An entry in the Mars Society's Mars Analog Rover Design Competition (Marsupial-Wombat). [See downloads above]
- Cairns, B., Fenton, A., and Hoffman, N. (2001). "Progress Towards Mars Rover Simulations in the Australian Outback." Abstract, 32nd Lunar and Planetary Science Conference, Houston. [See downloads above]
- Mann, G.A. (2002). "Design, Construction, and Operations Plan for the Marsupial Rover." Exploring the Red Planet: Proceedings of the Second Australian Mars Exploration Conference, University of Sydney, July 2002.
- Mann, G.A. and Clarke, J.D.A. (2003). "First comparative field test of pressurised rover prototypes." Abstracts of the 3rd Australian Mars Exploration Conference, Trinity College, Perth, August 2003.
- Mann, G.A., Wood, N.B., Clarke, J.D.A., Piechocinski, S., Bamsey, M. and Laing, J.H. (2004). "Comparative Field Tests of Pressurised Rover Prototypes." AAS 03-319. In Cockell, C. (Ed.), Martian Expedition Planning, AAS Science and Technology Series, Vol 107, Univelt Publishing, pp. 313–327.
- Mann, G.A., Wood, N.B., Clarke, J.D.A., Piechocinski, S., Bamsey, M. and Laing, J.H. (2004). "Comparative Field Tests of Pressurised Rover Prototypes." Journal of the British Interplanetary Society, Vol 57, No. 3/4, pp. 135–143.
- Mann, G.A. (2004). "Trials and Tribulations of the Starchaser Marsupial Rover." Proceedings of the 4th Australian Mars Exploration Conference, University of South Australia, July 2004.
Further Reading
Clark, Benton. "Mars Rover." In Carol R. Stoker and Carter Emmart (eds.), Strategies for Mars: A Guide to Human Exploration, Science and Technology Series, 1996, pp. 445–63.
External Resources
Related Projects & Links
Other pressurised rover programmes and related resources from the Mars Society Rover Initiative era.
Get Involved with the Marsupial Project
Engineers, fabricators, and Mars enthusiasts welcome. The project is based in Adelaide, South Australia.