
Mars Society Australia · Robotics Project
Eyes for Mars
Custom hyperspectral sensors, machine-learning mineral identification, and a portable rover with attitude — proven in Ladakh, Utah and the radiation beamline at ANU.
Project lead: Dr S.W. Hobbs (UNSW Canberra · Mars Society Australia) — with J.D.A. Clarke and I. French (Mars Society Australia)
$1,000 MSA grant has delivered space-radiation testing plus Mars-analogue trials of Space 2.0 hardware in extreme, high-altitude environments.
THE PROJECT
Low-cost sensors. Real Mars science.
Mars’O Bot is Mars Society Australia’s long-running robotics programme. Its current chapter, Eyes for Mars, asks a deceptively simple question: can off-the-shelf imaging hardware do real planetary science — and survive the trip?
Many Martian minerals show distinctive spectral signatures across the wavelengths a common silicon CCD or CMOS sensor can already see. If a low-cost “Space 2.0” camera can be coaxed into discriminating those signatures, and shown to tolerate years of deep-space radiation, it opens the door to genuinely affordable planetary missions — from CubeSats to small surface rovers.
This grant funded both halves of that question: sensor performance in a Mars-analogue field environment, and survivability under proton irradiation at the Australian National University’s Heavy Ion Accelerator Facility.
CubeSats in Mars orbit — the kind of mission Space 2.0 sensors are sized for. Artist’s concept.
OBJECTIVES
What this grant set out to prove
- Demonstrate that common silicon-based CCD/CMOS sensors can exploit the spectral phenomenology of Martian minerals — especially iron-oxide-rich materials and analogous biosignatures.
- Continue assessment of deep-space environment risks on low-cost "Space 2.0" sensors.
- Investigate the utility of a COTS 12 megapixel imaging camera for multispectral and hyperspectral applications.
- Use the Ladakh field trip to inform bandpass filter choice for multispectral imaging of Mars-analogue materials.
- Characterise hyperspectral sensor performance for training edge-based classifiers.

High-altitude Ladakh — cold, dry, thin atmosphere, iron-rich rock. A close terrestrial Mars analogue.
FIELD TESTING SITES
Ladakh, Northern India — 3,500 to 5,300 m
Testing was conducted near Leh (3,500 m) and at Lake Tso Khar (4,500 m), with visited altitudes ranging up to 5,300 m. The combination of altitude, aridity, iron-rich geology and biological “desert varnish” makes Ladakh one of the strongest accessible analogues for Mars surface conditions on Earth.
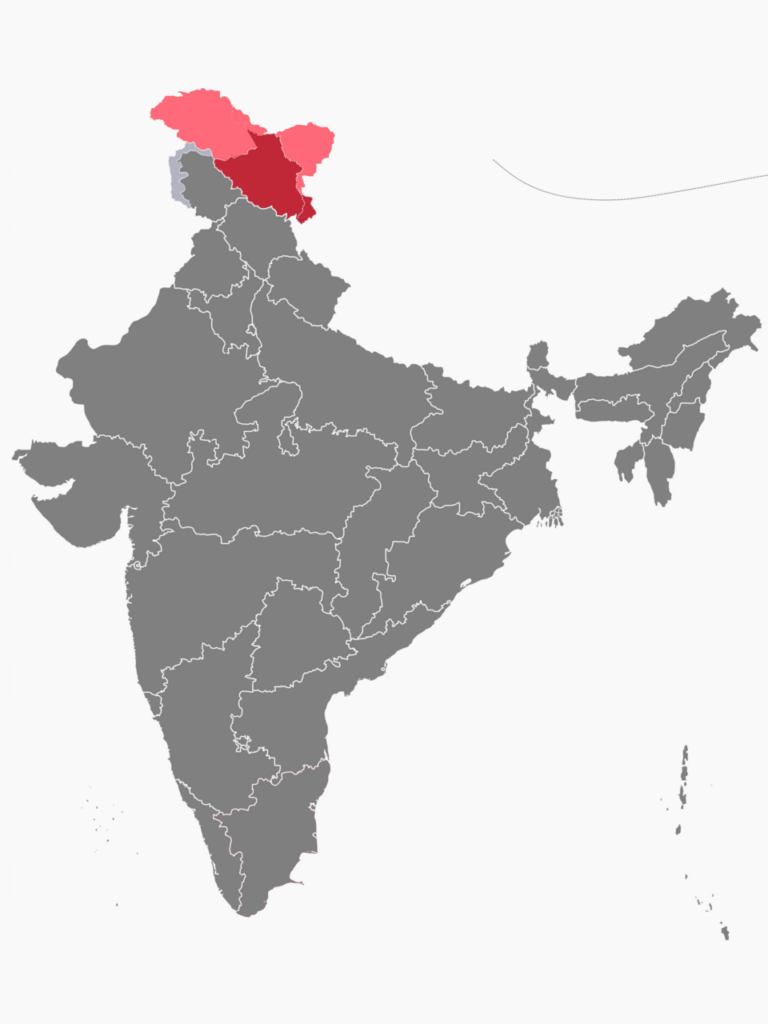
Ladakh sits in India’s far north, in the Trans-Himalayan rain shadow.
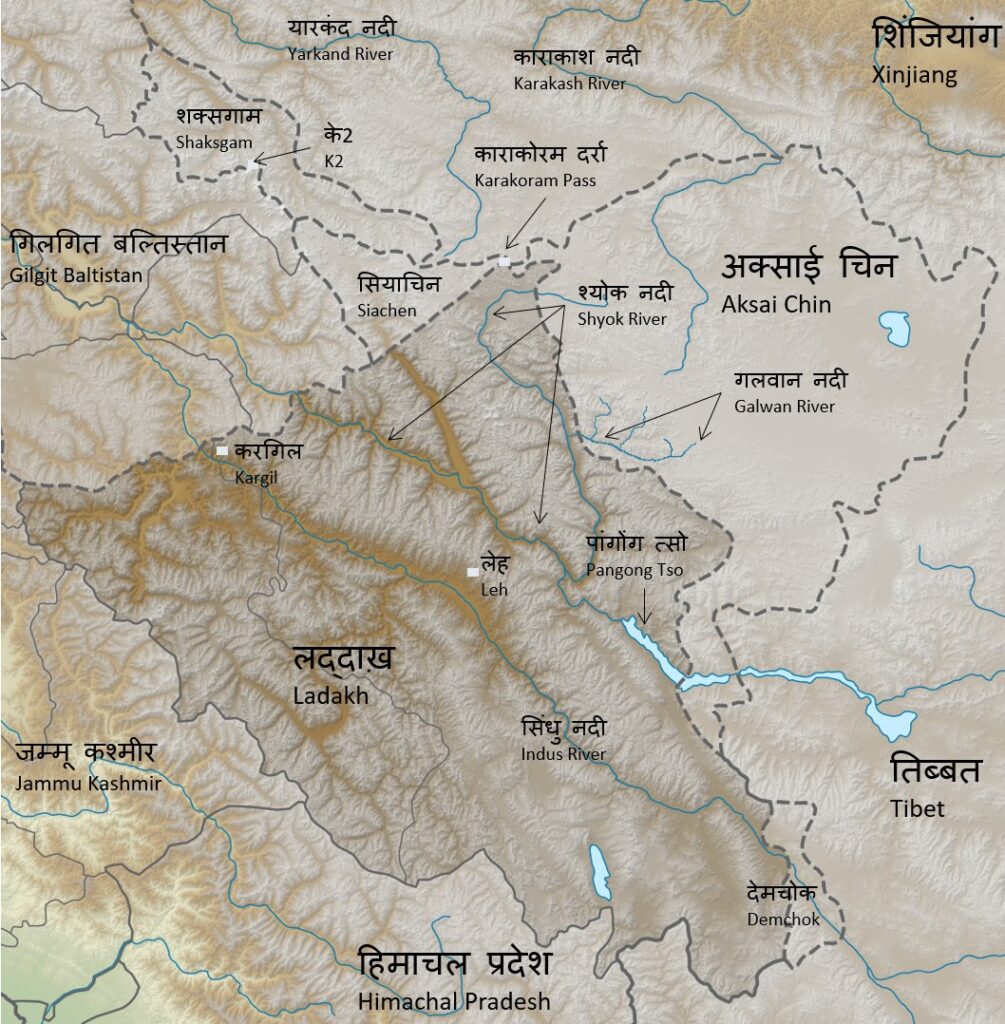
Field sites near Leh and Lake Tso Khar.
A high-altitude Ladakh valley, rendered in sepia to emphasise its Mars-like character.
INSTRUMENT
The 0.5U hyperspectral sensor
A custom, 3D-printed optical bench built around a COTS camera, sensitive across 450–850 nm — wide enough to span the visible band and into the near infrared where many key mineral and biological signatures sit.
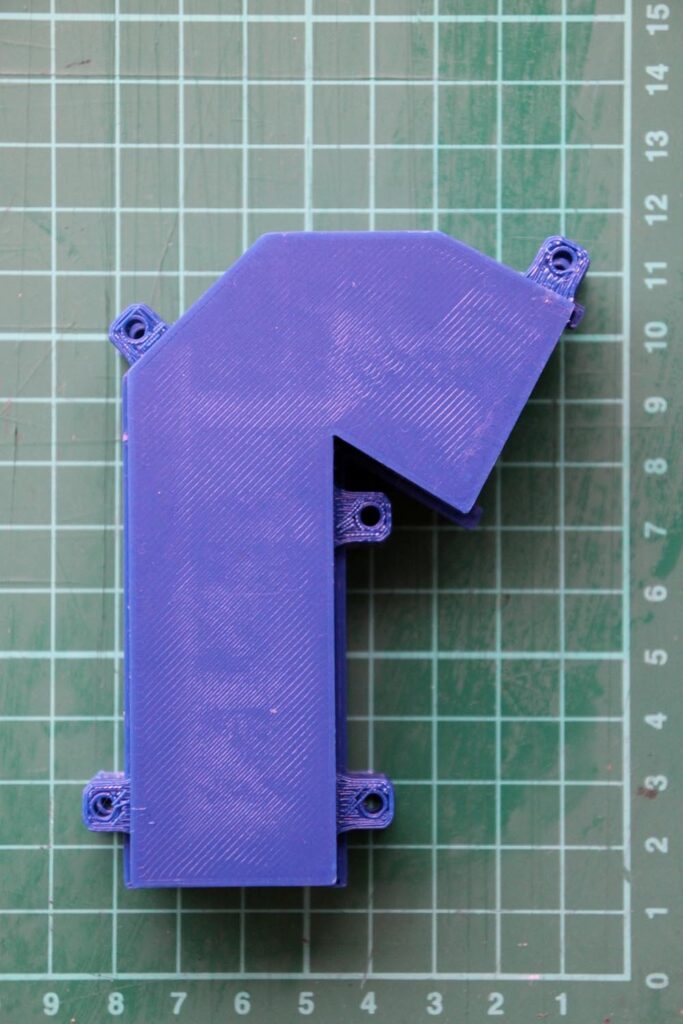
The 0.5U hyperspectral payload — a folded optical path with objective, slit, collimator, grating and camera packed into a CubeSat-compatible volume.
Why a COTS camera?
Mass-produced consumer sensors deliver consistent spectral performance across copies, supported by mature software and interface stacks. The Bayer filter does cost some absorption efficiency relative to a monochrome sensor — but that trade is worth the supply-chain and integration savings.
Field collection
Reference samples were collected near Lake Tso Khar against a controlled colour target, including:
- Vegetation classes (two grass types)
- Microbial-coated rocks ("desert varnish")
- Surrounding regolith
Ladakh provided exactly the right Mars-analogue context to choose bandpass filters and to build the spectral training set.

Sample collection on grassland near Lake Tso Khar.

Reference target on iron-rich scree — Mars in miniature.

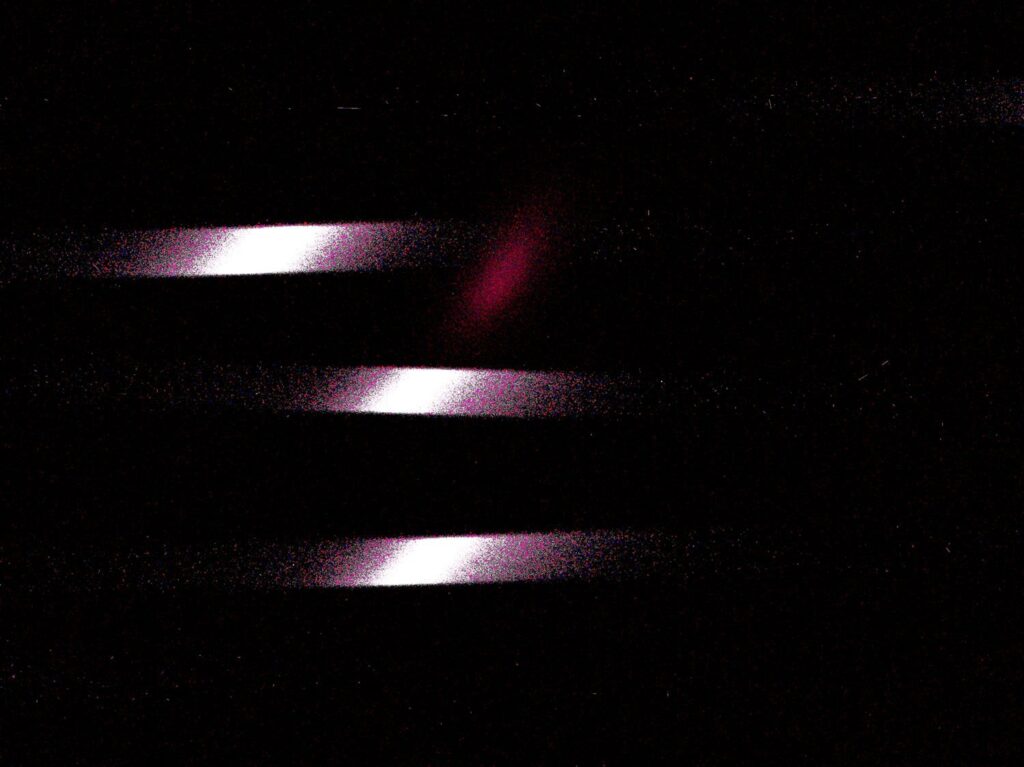
A captured spectrum — visible bands (left) flowing into the near-infrared (right).
MACHINE LEARNING
Automated mineral classification
A neural network was trained on four field-collected classes — coated rock, regolith, grass type 1, grass type 2 — using a standard training/validation split. The result was a model that could discriminate spectrally between visually similar materials with very high confidence.
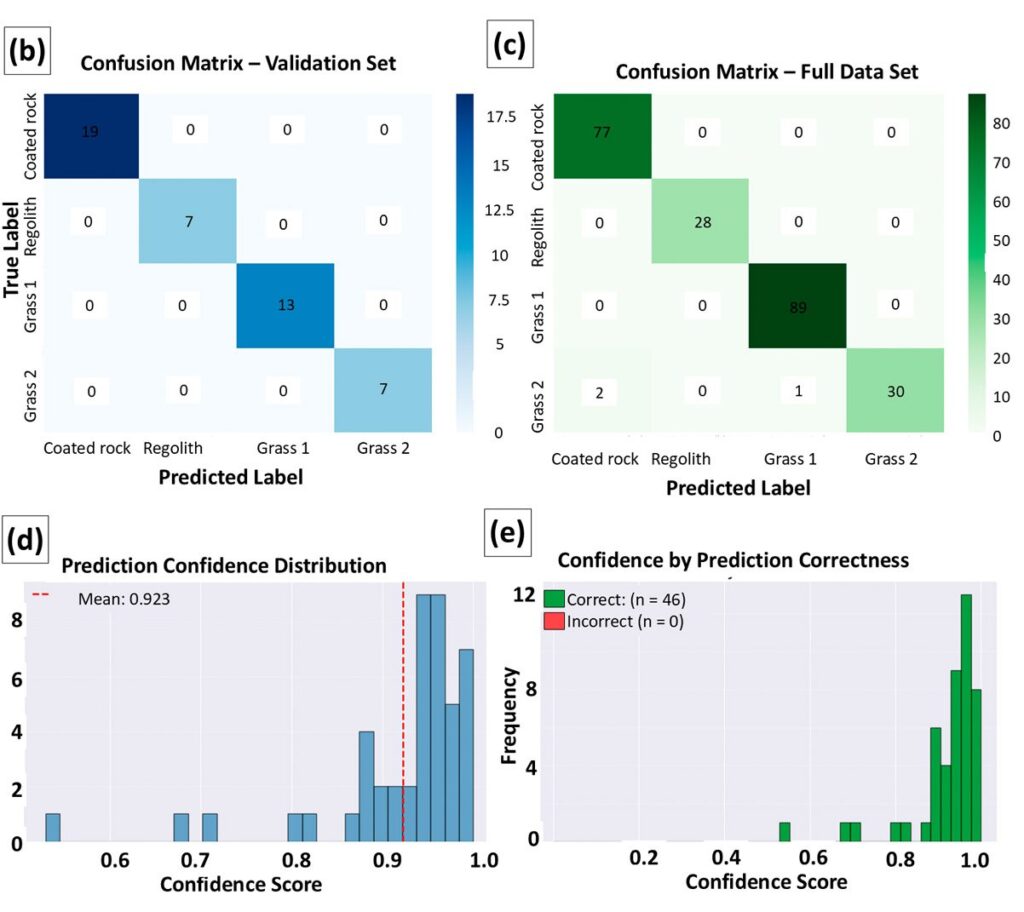
Confusion matrices for the validation and full data sets, plus prediction-confidence distributions.
The classifier handled the toughest case well — distinguishing microbial-coated rocks from the surrounding regolith and from spectrally similar but distinct vegetation. That separation is exactly the kind of false-positive reduction Mars surface science needs, and demonstrates that automated feature extraction can run at the sensor edge to cut downlink bandwidth.
SURVIVABILITY
Proton irradiation at ANU HIA
An imager that works on the ground only matters if it still works after the trip. The cameras were taken to the Heavy Ion Accelerator Facility at the Australian National University and deliberately tested to the point of failure on the Space Irradiation Beamline (Line B).
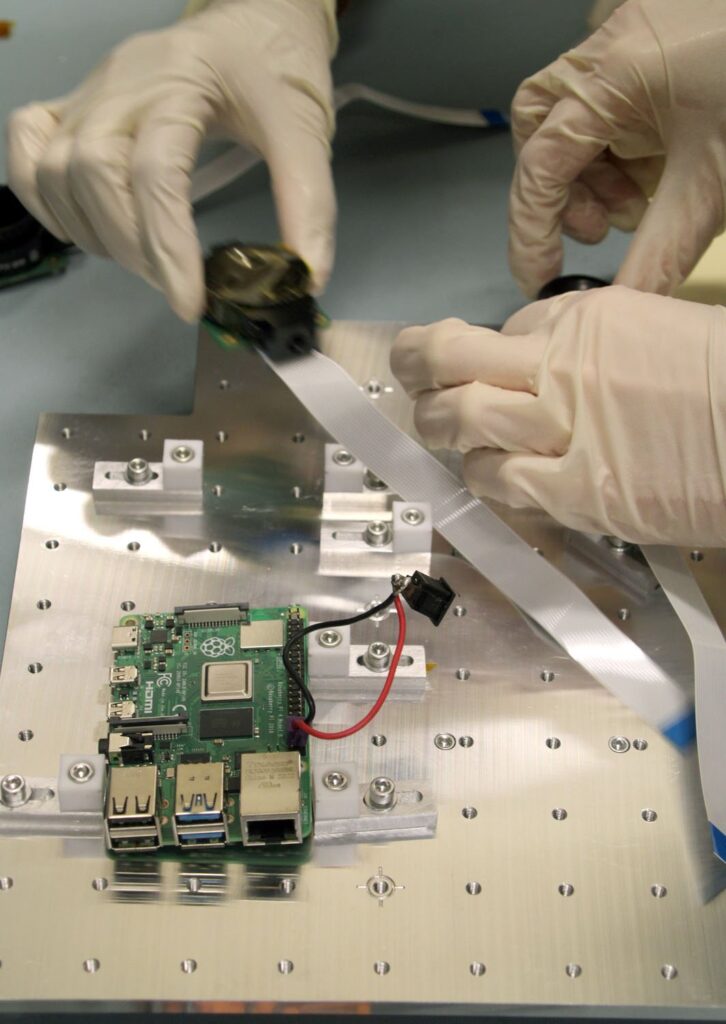
Camera and Raspberry Pi controller being mounted in the irradiation rig at ANU HIA.
Beam parameters
Protons accelerated to 26 MeV — about 23 % of the speed of light, in the transition zone between classical and relativistic regimes. That is enough energy to punch straight through a silicon Coulomb barrier (~4 MeV) with 22 MeV remaining.
What the protons do
Some protons fuse with sensor silicon (²⁸Si) to form phosphorus, with unstable ²⁹P / ³⁰P generated as well. Additional unstable Na, Mg, Al and Si isotopes appear, producing short-term post-test radioactivity that we monitored carefully.
Linear energy transfer (LET) for the test beam: 1.65 × 10⁻² cm²/mg.
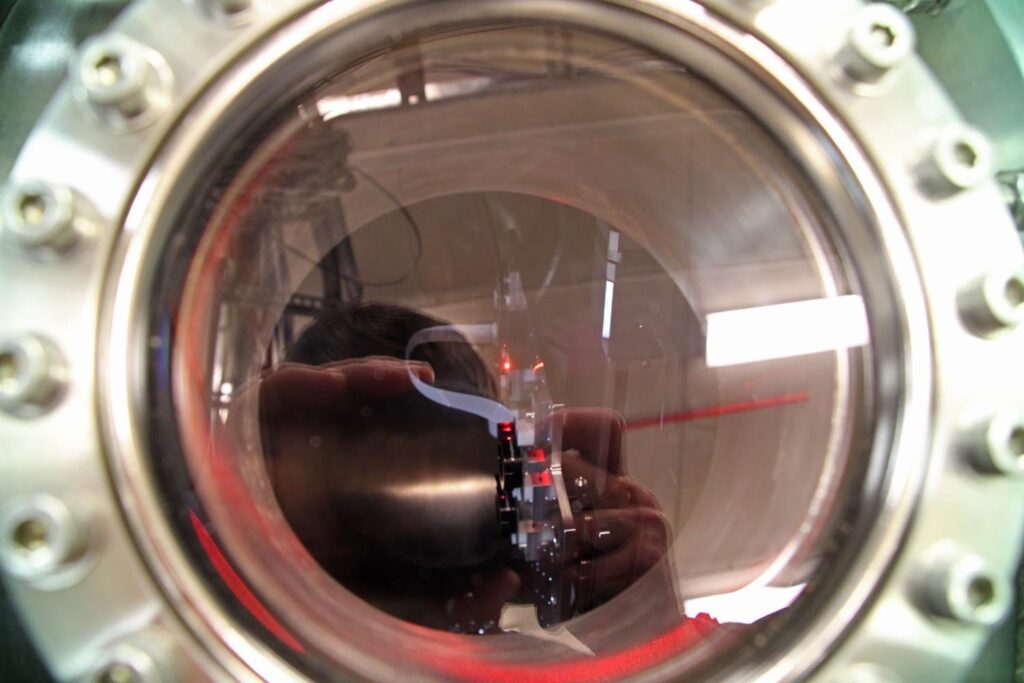
Looking through the chamber porthole during testing.

Live remote feed from a camera inside the chamber, mid-irradiation.
SURVIVABILITY — RESULTS
Noise floor and damaged pixels
Dark-current noise floor
Radiation increases dark current, which raises the image noise floor. We tracked the mean digital-number (DN) value of dark frames through accumulated dose. At 10 Gy — equivalent to ten years in Mars orbit — there was no appreciable increase. By 2,000 Gy, the noisiest channel (blue) reached a mean of about 20 DN. That is recoverable with recalibration.
Hot-pixel mapping
Hot (damaged) pixels were tracked at four exposure ranges — Dark, Low, Mid and High. Above 250 DN there was zero increase until the maximum 1,000 Gy dose, and only on the High exposure (just 10⁻³ %). At >200 DN, High and Dark exposures showed an increase — but only after the equivalent of decades of Mars-orbit exposure.
The camera continued operating while imaging the proton beam itself. Irradiation to failure failed to work.
HEADLINE RESULT
The camera would survive on Io.
After irradiating to 2,000 Gy — equivalent to roughly 60 days on Io, one of the most heavily irradiated locations in the Solar System — the Ladakh hyperspectral instrument was re-tested. The 2,000 Gy noise spectrum tracked the clean spectrum almost perfectly. The data was still useable.
For the planned 2-year CubeSat Mars mission, that’s an enormous safety margin.
INTEGRATION — THE ROVER
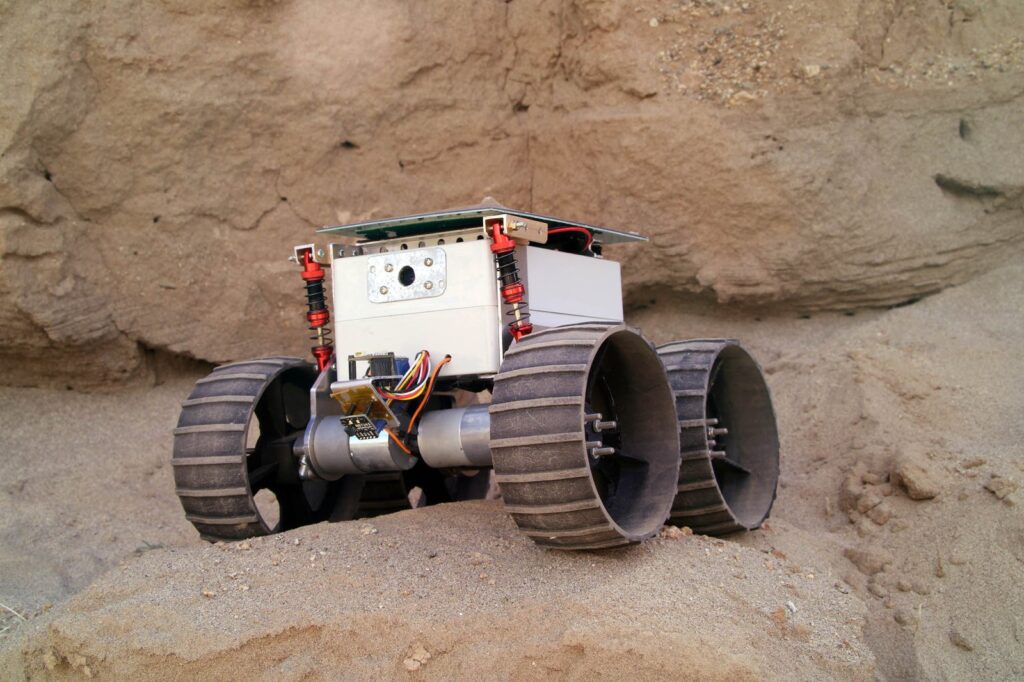
BitsnBytes
Crewed Mars surface time is precious. A small, portable rover that can be carried by astronauts and deployed at the limit of their walk-back distance can extend exploration past the human boundary — or be sent ahead to scout a high-value EVA before the crew leaves the habitat.

BitsnBytes deployed in Ladakh.
Design choices
- 4-wheel skid steer — fewer parts, fewer failure points, lower power than steered designs (no steering servos).
- Small footprint — fits ride-share payload volumes and is carryable by an EVA crew.
- Built on previous iterations of MSA robotics — a lineage that goes back to the original Mars'O Bot rovers.
Sensor payload
- Single RGB camera for context imagery
- 14-band VIS / NIR point spectrometer for spot mineralogy
- Weather sensor (temperature, pressure)
- UV sensor — relevant at altitude and on Mars

MOBILITY
Slope and surface trials
BitsnBytes was put through its paces on Mars-analogous surfaces, on slopes ranging from level ground out to 20°. As expected, rover velocity decreased with slope, and a rocky matrix degraded mobility further — but the rover successfully negotiated the full range of terrain it was asked to handle.
The mobility envelope was characterised in enough detail to plan future EVA-paired operations: where the rover can go on its own, where it needs the crew nearby, and where it shouldn’t be sent at all.
Aerial view during mobility testing at MDRS, Utah.
SUMMARY
Outcomes
- A 0.5U hyperspectral sensor that successfully discriminated visually similar vegetation, microbial-coated rocks vs surrounding regolith, and similar-coloured targets that would otherwise produce false positives.
- Low-cost multispectral and hyperspectral sensors successfully trialled in an extreme Mars-analogue environment.
- Automated feature extraction via machine learning demonstrated end-to-end — reducing downlink bandwidth needs.
- Demonstrated proton-radiation resilience far in excess of Mars-mission requirements; cameras continued operating even while imaging the irradiation beam itself.
Next steps
- Integrate the hyperspectral sensor and machine-learning stack with the BitsnBytes rover platform.
- CubeSat development for high-altitude balloon testing.
- Continue mobility characterisation on increasingly Mars-relevant terrain.
Project lead
Dr Steve W. Hobbs
UNSW Canberra · Mars Society Australia
HERITAGE
The Mars'O Bot lineage
Mars’O Bot has been an MSA robotics programme since the early 2010s. BitsnBytes is the latest in a line of rovers that includes Big Blue Rover, the Mining Rover, Little Blue Rover, the original MarsObot and Marsobot Junior — each with a different role and payload, and each built around the same philosophy: affordable, open, and field-proven.
ACKNOWLEDGEMENTS
With thanks
Mars Society Australia — for the grant that made the field deployment, ML training and irradiation testing possible.
ANU Heavy Ion Accelerator Facility (HIA) — beam time on the Space Irradiation Beamline (Line B) and technical support throughout the radiation campaign.
UNSW Canberra — for ongoing institutional support of this work.